<!-- Yandex.Metrika --> |
Книгу В. Маркуц "Транспортные потоки" Вы можете найти здесь: http://markuts-v.narod.ru Скачать книги V._Markucc_Narod_religiya_i_vlast.docx Скачать книгу В.Маркуц "Расчёт влажности грунтов активной зоны"Вы можете ЗДЕСЬ_Vlazhnost.docxМаркуц Вениамин Михайловичканд. техн. наук (Ph.D.)DOCTOR OF SCIENCE , HONORIS CAUSA of Academy of Natural History
профессор РАЕFULL MЕMBER EUROPEAN ACADEMY OF NATURAL HISTORYЗаслуженный работник науки и образованияКонтактная информация:г. Тюмень:8 (3452) 43-98-86E-mail: markusb@mail.ruvmarkuc@yandex.ruкнигу В. Маркуц "Народ, религия и власть" Вы можете скачать здесь: Вениамин МаркуцПолучить полный текст книгиВ. Маркуц "Расчёт нежёстких дорожных одежд со слоями из слабосвязных материалов" в электронной форме
Вы можете ЗДЕСЬ_Raschet_nezh.d.o.docx
Купить книгу "Расчёт нежёстких дорожных одежд со слоями из слабосвязных материалов" на бумажном носителе Вы можете, нажав на эту ссылку:«Расчёт нежёстких дорожных одежд со слоями из слабосвязных материалов»Книга В. Маркуц ″Расчёт нежёстких дорожных одежд со слоями из слабосвязных материалов″978-3-8484-9107-0_Coverpreview_3.pdf
|
© из книги В. Маркуц «Транспортные потоки»1. Развитие дорожно-транспортной ситуации обгона Обгон одного транспортного средства или целой группы другим автомобилем является наиболее распространённым явлением в дорожно-транспортной ситуации (рис 1). Основное число дорожно-транспортных происшествий на автомобильных дорогах является следствием негативного её развития. Развитие дорожно-транспортной ситуации обгона в двух транспортных потоках противоположных направлений происходит следующим образом. Основными участниками взаимодействия являются три автомобиля: обгоняющий автомобиль [ i ], обгоняемый автомобиль [ i+1 ] и встречный автомобиль [ j ]. Автомобиль [ j+1] не является участником дорожно-транспортной ситуации, не участвует в её развитии, так как проезжает мимо. Он необходим только для обозначения сечения дороги при составлении логистических уравнений дорожно-транспортной ситуации совместно с автомобилем [ i+1 ], который принимает непосредственное участие в развитии ситуации обгона. Автомобиль [ i ], намереваясь совершить обгон автомобиля ( или группу автомобилей ) [ i+1 ], приближается к нему и к осевой линии дороги и держится от него на минимальном расстоянии безопасности, равном одному вильку линии маневрирования в ожидании приемлемых интервалов между автомобилями [ j ] и [ j+1] и между автомобилями [ i+1 ] и [ i+2]. При этом, в случае неблагоприятного стечения обстоятельств, у него ещё сохраняется возможность вернуться на свою полосу движения, почти вплотную приткнувшись к заднему бамперу автомобиля [ i+1]. Полная длина линии маневрирования при слиянии потоков состоит из двух обратных кривых переменного радиуса ( из двух вильков ) и равна: lm = 2V (b/J)1/3 или lm = 2V [b/g(μ + iп)]1/2………...... ( 3 ). Поэтому временно′ й интервал одного вилька составляет: τ == (b/J)1/3 или τ = [b/g(μ+iп)]1/2 …. ( 4 ). Здесь где b - ширина полосы движения ( м ), V – скорость транспортного потока, J - величина нарастания центробежного ускорения ( третья производная пути по времени ) равна 0.3 – 0.8 м/сек3, μ - коэффициент поперечной силы (μ = 0.11 – 0.15 ), iп - поперечный уклон проезжей части на участке смены полосы движения ( iп = 0.015 – 0.020 ). При таких параметрах величина минимального зазора безопасности, равная одному вильку линии маневрирования, равна 1.5 – 2 секунды, или при средней скорости транспортного потока 18 – 25 м/с ( 65 км/час – 90 км/час ) это расстояние составляет 30 – 50 метров. 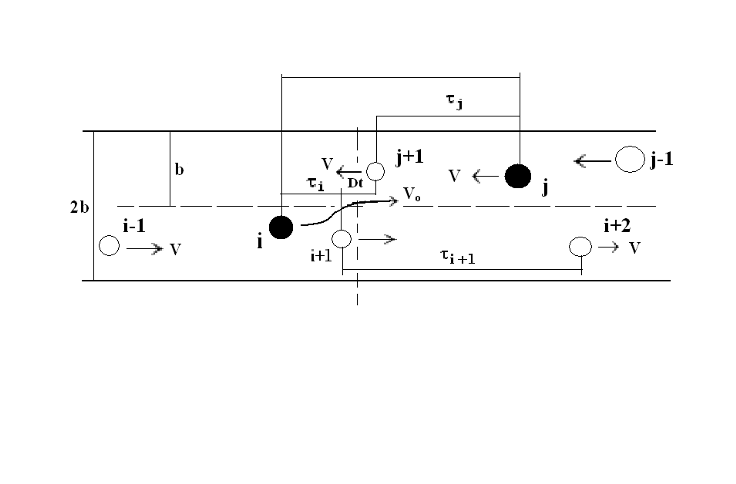
Рис 1 Схема развития дорожно-транспортной ситуации при обгоне в двух транспортных потоках противоположных направлений (прямой поток – автомобили с индексом i, обратный поток – автомобили с индексом j) Рассмотрим некоторые возможности развития дорожно-транспортной ситуации. Ситуация первая. Встречный автомобиль [ j ] находится на достаточном расстоянии от обгоняющего автомобиля [ i ], что позволяет тому благополучно начать и завершить обгон автомобиля [ i+1]. Дорожно-транспортной ситуация при обгоне может считаться завершённой благополучно, если не только не возникнет аварийная ситуация, но и не произойдёт снижения скорости во встречных транспортных потоках. Этому удовлетворяет такое завершение обгона, когда обгоняющий автомобиль [ i ], встраиваясь между автомобилями [ i+1 ] и [ i+2 ] окажется на безопасном расстоянии как от них. При этом обгоняемому автомобилю [ i+1 ] не придётся снижать скорость, а автомобилю [ i+2 ] не придётся беспокоиться за свой задний бампер и удирать от догоняющего его автомобиля [ i ]. Математический аппарат представлен уравнениями главы 3 (Расчёт линий маневрирования и слияния автомобильных дорог и городских улиц). Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 1-а и 1-б. Ситуация вторая. Встречный автомобиль [ j ] находится на достаточном расстоянии от обгоняющего автомобиля [ i ], что позволяет тому попытаться начать обгон автомобиля [ i+1] при недостаточном интервале между автомобилями [ i+1 ] и [ i+2 ]. В этом случае он буквально "подрезает" автомобиль [ i+1 ] или "садится на хвост" автомобилю [ i+2 ]. В зависимости от квалификации участников дорожно-транспортной ситуации и их дальнейшего поведения в её развитии, исход может завершится либо благополучно, либо совершением ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 2-а и 2-б. Ситуация третья. Временной интервал между автомобилями [ i+1 ] и [ i+2 ] вполне достаточен для начала и завершения обгона автомобиля [ i+1]. Однако встречный автомобиль [ j ] находится на недостаточном расстоянии от обгоняющего автомобиля [ i ]. В зависимости от квалификации участников дорожно-транспортной ситуации и их дальнейшего поведения в её развитии, исход может завершится либо благополучно, либо совершением ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 3-а и 3-б. Ситуация четвёртая. И встречный автомобиль [ j ] находится на недостаточном расстоянии от обгоняющего автомобиля [ i ], и интервал между автомобилями [ i+1 ] и [ i+2 ] небольшой, однако автомобиль [ i ] пытается начать обгона автомобиля [ i+1]. В зависимости от квалификации участников дорожно-транспортной ситуации и их дальнейшего поведения в её развитии, исход может завершится либо благополучно, либо совершением ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 4-а и 4-б. Ситуация пятая аналогична предыдущей ситуации, однако отличается от неё тем, что обгоняющий автомобиль [ i ] практически "сидит на хвосте" автомобиля [ i+1], то есть не только пытается начать обгон, когда у него ещё имеется возможность вернуться на свою полосу, но уже приступил к обгону. Здесь исход развития дорожно-транспортной ситуации полностью зависит от квалификации и интеллекта участников дорожно-транспортной ситуации и их дальнейшего поведения: либо автомобиль [ i+1] уступит своё место в потоке, свернув на обочину, либо встречный автомобиль [ j ] свернёт на обочину, либо ситуация завершится ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 5-а и 5-б. Ситуация шестая аналогична предыдущей ситуации, однако отличается от неё тем, что временной интервал между автомобилями [ i+1 ] и [ i+2 ] вполне достаточен для начала и завершения обгона автомобиля [ i+1]. Здесь исход развития дорожно-транспортной ситуации полностью зависит от квалификации и интеллекта участников дорожно-транспортной ситуации и их дальнейшего поведения: либо автомобиль [ i+1] уступит своё место в потоке, свернув на обочину, либо встречный автомобиль [ j ] свернёт на обочину, либо ситуация завершится ДТП. Алгоритм реализован в программе SitObgn_T для равномерного транспортного потока интенсивностью М1в прямом направлении и М2 – в обратном направлении, а так же в программе BTZ1_T для бимодального режима движения в двух направлениях - ситуация 6-а и 6-б. Ситуации 7-а (7-б) и 8-а (8-б) позволяют определять количество автомобилей, которые имеют твёрдое намерение начать и завершить обгон, они уже выехали на встречную полосу, и у них практически не осталось возможности вернуться на свою полосу. Различие этих ситуаций в том, что в ситуации 8-а (8-б) обгоняющий автомобиль [ i ] отстоит от автомобиля [ i+1] на расстоянии равном одному вильку, то есть временной интервал составляет τ = (b/J)1/3, а в ситуации 7-а (7-б) на расстоянии разности тормозных путей автомобилей [ i ] и [ i+1 ] τ = [V(Kз - Kп] / [2g(mφ + ψ)] ………………. (5). Здесь Кз и Кп – коэффициенты эксплуатационных условий торможения соответствующих автомобилей. ψ – дорожное сопротивление равное: f +- i, где i - продольный уклон.Коэффициент сцепления шины с поверхностью дороги φ принимают равным 0.7 или 0.3 соответственно для сухой или мокрой загрязнённой поверхности покрытия, коэффициент сопротивления качению f принимают равным 0.02. Коэффициент сцепного веса m принимается равным 1. Принимая ширину проезжей части b = 3.5 м, (Кз – Кп) равным 1.4, скорость транспортного потока V - 60 км/час, J - величина нарастания центробежного ускорения 0.8 м/сек3 получаем в ситуации 7-а (7-б) интервал 1.62 сек, в ситуации 8-а (8-б) интервал 1.65 сек. Таким образом, при скорости транспортного потока V = 60 км/час временные интервалы, рассчитываемые по двум разным формулам практически одинаковы при всех прочих равных условиях. Ситуации обгона происходят в обоих транспортных потоках – в прямом и обратном направлениях. Индекс "а" обозначает поток прямого направления, а индекс "б" - поток обратного направления. Получить полный текст моей книги «ТРАНСПОРТНЫЕ ПОТОКИ АВТОМОБИЛЬНЫХ ДОРОГ И ГОРОДСКИХ УЛИЦ (ПРАКТИЧЕСКИЕ ПРИЛОЖЕНИЯ) Вы можете ЗДЕСЬ_Tr.pot.docx В. Маркуц
|


|
http://narod.ru/disk/20522387000/%D0%92.%20%D0%9C%D0%B0%D1%80%D0%BA%D1%83%D1%86%20%20%20%D0%9D%D0%B0%D1%80%D0%BE%D0%B4%2C%20%D1%80%D0%B5%D0%BB%D0%B8%D0%B3%D0%B8%D1%8F%20%D0%B8%20%D0%B2%D0%BB%D0%B0%D1%81%D1%82%D1%8C.docx.htm |
|
|